Week 7
My progress the last two weeks has been almost minimal, the project along with the work was put at a halt because the thermistor I was working with broke when I was trying to fix it back on. I had a spare, however while trying to fix the spare on to the board, It slipped out of my pincers on to the floor. The thermistors themselves are so small it was impossible to find them on a white and black spotted flooring.
Just look at how small this is. It doesn't help even in the slightest that the thermistor itself was black and white.
I had to put an order on and it seems it wont come until next week.
So, for today's blog, I will go over the terms and research that I have done to further inform you about my work.
So for my project itself, I had mentioned working with PWM configurations, microcontrollers, ADCs, thermistors, PID controllers, and N-Channel MOSFETs. PWM is an acronym that stands for Pulse Width Modulation. This is a specific type of configuration for an output of an electric signal. You can imagine this output as a sine wave, but instead, when the point on the wave is positive, the electric signal will be sent, and when the point is negative, the electric signal will not be sent.

So, with that in mind we get some sort of wave that looks like this. I previously talked about how PWM turns an LED off and on very fast? This is the wave function that does that. The period, being one full cycle of the switch or wave, is miniscule. The duty cycle is how long the 'on' function is for the wave, with respect to the period. The ratio between the duty cycle and the period is what determines how bright said LED will be. The bigger the duty cycle, the brighter it will be. The opposite is also true.
PWM outputs are given by microcontrollers and other electric devices alike. But in my project I'm working with this microcontrollers specifically.
Imagine them as a small computer with all its own components, including a processor, memory, and RAM. Although, microcontrollers have pins coming out of it as shown above for multiple purposes. These pins can function as in and out ports, being that most of them are programmable. This allows for giving outputs such as PWM and taking in inputs.
The ability to take in inputs allows for ADC control. ADC is an acronym for analogue to digital converter. ADCs allow for an input voltage to be interpreted as something else. This can allow for an interpretation of many things alike. However, I am currently using it to measure voltage with a thermistor. Thermistors are a resistor that vary in resistance according to how hot it is. I have my ADC input tapped into a circuit with a thermistor, and according to said circuit, you are able to interpret the voltage as a specific temperature.
And with a certain temperature, I can use a PID controller to respond and send a signal to another circuit. PID Controllers are a specific type of controller that can account for a difference and respond to it in a very fluid way. PID stands for proportional integral derivative, Which each part has their own influence in a special way.

Using a set point defined by code, the user can have this code interpret and change a value or send a signal depending on the value of 'PID'. This allows for coders to account for changes in whatever way they want. The Kp, Ki, and Kd are all coefficients that determine the strength of each part of the PID controller. The key idea is to use these coefficients properly to maintain a slow and steady increase or decrease to your selected value. Also, try to avoid overshooting your target, you want to hit it, not go above it.

With my project specifically, I am using a PID controller and a PWM output to control a N-Channel MOSFET to switch a signal on an off towards the heater in the printer head. N-Channel MOSFETs are a special type of gate that allows for some sort of flow when a voltage is applied to both D and G, allowing voltage to flow out to S.
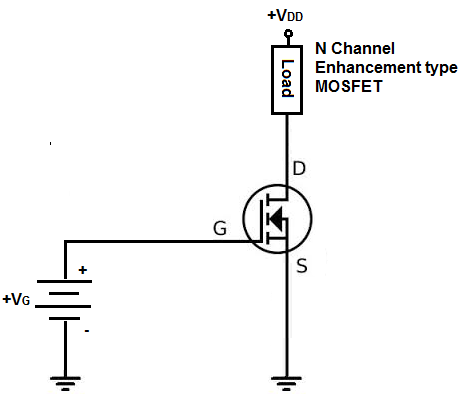
This depiction of a MOSFET shows the circuit I will be using to switch my heater on and off. The signal going to the heater is S, the signal from g is my microcontroller, and the signal from D is from a 24v power supply. The microcontroller will use all of these aspects I have mentioned to form the final product of my project, a heating control loop.
-3/24/17
This is legitimately amazing. I never understood how complicated just heating ink could be.
ReplyDelete